Российские инженеры создали полётный контроллер для точного управления дронами
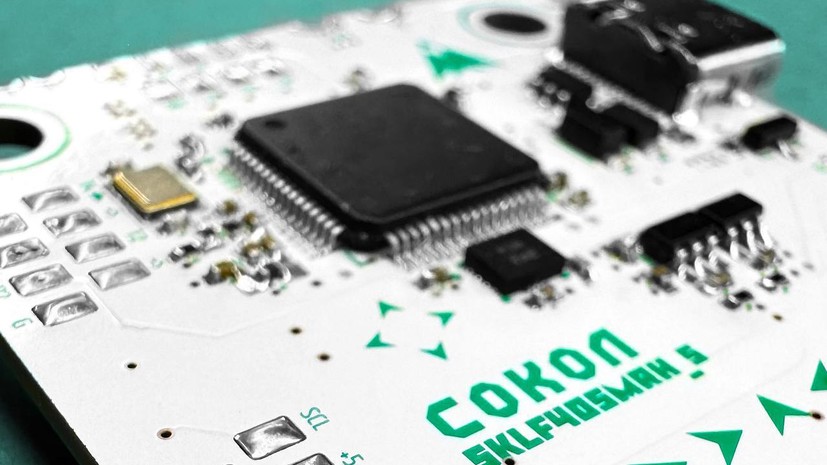
- © Максим Папенков, директор компании «СОКОЛ»
«Полётный контроллер — это настоящие «мозги» любого беспилотника, именно он играет ключевую роль в обеспечении стабильности и безопасности полёта. Речь идёт прежде всего об отслеживании высоты, скорости, курса и других критически важных данных. Также благодаря полётному контроллеру планируется маршрут и корректируется курс в реальном времени, чтобы беспилотник достиг своей цели. Это же устройство используется для проверки состояния двигателей, топливной системы, гидравлики и электроники, чтобы убедиться, что всё работает исправно», — рассказал Папенков.
По его словам, при разработке контроллера была использована система электропитания собственной разработки, которая позволяет повысить тягу БПЛА в среднем на 15% без каких-либо изменений конфигурации мотора.
Отмечается, что на данный момент архитектура полётного контроллера поддерживает все современные полётные программы, такие как BetaFlight и ArduPilot, которые используются в сообществе разработчиков и операторов беспилотных летательных аппаратов.
При этом разработчики оставили возможность работать и с самописными программами, то есть пользователи, которые предпочитают разрабатывать собственное ПО для управления полётом, также могут использовать контроллер.
«Сейчас мы производим небольшие партии полётных контроллеров, которые проходят тщательные испытания и тестирования. Основными нашими потребителями на данный момент являются цеха по сборке FPV-дронов и образовательные организации. Наши полётные контроллеры используются в учебных лабораториях и на практических занятиях, помогая студентам освоить основы управления дронами и понять принципы работы современных авиационных систем», — отметил собеседник RT.
Ранее сообщалось, что в России разработали отечественный программно-аппаратный комплекс «Квадросим» для подготовки операторов беспилотных летательных аппаратов (БПЛА) любого уровня.